|
PathsA path is a pseudo object, representing a succession of points with orientation in space. pseudo object, since it is built using merely dummies and a customization script that describes its functionality and behaviour.
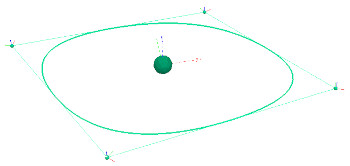
[Simple path containing 4 control points] Path objects can be added to the scene with [Add > Path]. A path is composed by control points that define its curve in space. Control points can be shifted, copy/pasted or deleted. A path's basic properties are accessed and adjusted via its user parameters (implemented via a user config callback function), in the scene hierarchy:
[User parameter icon] A path can also automatically generate extruded shapes; this functionality is enabled via its user parameters, and the shape profile, color and other details can be adjusted in its customization script, which uses the API function sim.generateShapefromPath: --lua
function path.shaping(path, pathIsClosed, upVector)
-- following section generates a square extrusion shape:
local section = {0.02, -0.02, 0.02, 0.02, -0.02, 0.02, -0.02, -0.02, 0.02, -0.02}
local color={0.7, 0.9, 0.9}
local options = 0
if pathIsClosed then
options = options | 4
end
local shape = sim.generateShapeFromPath(path, section, options, upVector)
sim.setShapeColor(shape, nil, sim.colorcomponent_ambient_diffuse, color)
return shape
end
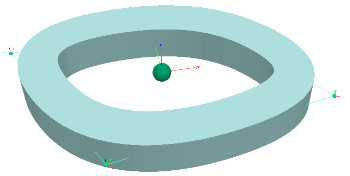
[Simple path generating an extruded square shape] To generate an extruded circular shape, use following code to create the section data: --lua
local section = {}
local radius = 0.02
local sides = 32
local da = math.pi * 2 / sides
for i = 0, sides - 1 do
section[2 * i + 1] = radius * math.cos(da * i)
section[2 * i + 2] = radius * math.sin(da * i)
end
-- the section shoujld be closed (first and last points perfect overlap):
section[#section + 1] = section[1]
section[#section + 1] = section[2]
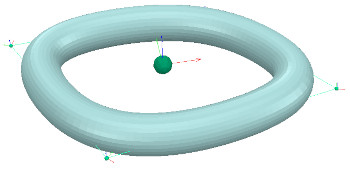
[Simple path generating an extruded circular shape] Path data is stored inside of the path object, as a custom data property. It can be accessed with: #python
# control point data (each one has x, y, z, qx, qy, qz, qw (position and quaternion)):
ctrlPts = sim.unpackDoubleTable(sim.getBufferProperty(pathHandle, 'customData.PATHCTRLPTS'))
# path data (each one has x, y, z, qx, qy, qz, qw (position and quaternion)):
pathData = sim.unpackDoubleTable(sim.getBufferProperty(pathHandle, 'customData.PATH'))
--lua
-- control point data (each one has x, y, z, qx, qy, qz, qw (position and quaternion)):
local ctrlPts = sim.unpackDoubleTable(sim.getBufferProperty(pathHandle, 'customData.PATHCTRLPTS'))
-- path data (each one has x, y, z, qx, qy, qz, qw (position and quaternion)):
local pathData = sim.unpackDoubleTable(sim.getBufferProperty(pathHandle, 'customData.PATH')
Various API functions related to paths are available, e.g. in order to have an object follow a path in position and orientation, one could use following script: #python
import numpy as np
def sysCall_init():
sim = require('sim')
self.objectToFollowPath = sim.getObject('..')
self.path = sim.getObject('/Path')
pathData = sim.unpackDoubleTable(sim.getBufferProperty(self.path, 'customData.PATH'))
m = np.array(pathData).reshape(len(pathData) // 7, 7)
self.pathPositions = m[:, :3].flatten().tolist()
self.pathQuaternions = m[:, 3:].flatten().tolist()
self.pathLengths, self.totalLength = sim.getPathLengths(self.pathPositions, 3)
self.velocity = 0.04 # m/s
self.posAlongPath = 0
self.previousSimulationTime = 0
sim.setStepping(True)
def sysCall_thread():
while not sim.getSimulationStopping():
t = sim.getSimulationTime()
self.posAlongPath += self.velocity * (t - self.previousSimulationTime)
self.posAlongPath %= self.totalLength
pos = sim.getPathInterpolatedConfig(self.pathPositions, self.pathLengths, self.posAlongPath)
quat = sim.getPathInterpolatedConfig(self.pathQuaternions, self.pathLengths,
self.posAlongPath, None, [2, 2, 2, 2])
sim.setObjectPosition(self.objectToFollowPath, pos, self.path)
sim.setObjectQuaternion(self.objectToFollowPath, quat, self.path)
self.previousSimulationTime = t
sim.step()
--lua
function sysCall_init()
sim = require('sim')
objectToFollowPath = sim.getObject('..')
path = sim.getObject('/Path')
pathData = sim.unpackDoubleTable(sim.getBufferProperty(path, 'customData.PATH'))
local m = Matrix(#pathData // 7, 7, pathData)
pathPositions = m:slice(1, 1, m:rows(), 3):data()
pathQuaternions = m:slice(1, 4, m:rows(), 7):data()
pathLengths, totalLength = sim.getPathLengths(pathPositions, 3)
velocity = 0.04 -- m/s
posAlongPath = 0
previousSimulationTime = 0
sim.setStepping(true)
end
function sysCall_thread()
while not sim.getSimulationStopping() do
local t = sim.getSimulationTime()
posAlongPath = posAlongPath + velocity * (t - previousSimulationTime)
posAlongPath = posAlongPath % totalLength
local pos = sim.getPathInterpolatedConfig(pathPositions, pathLengths, posAlongPath)
local quat = sim.getPathInterpolatedConfig(pathQuaternions, pathLengths,
posAlongPath, nil, {2, 2, 2, 2})
sim.setObjectPosition(objectToFollowPath, pos, path)
sim.setObjectQuaternion(objectToFollowPath, quat, path)
previousSimulationTime = t
sim.step()
end
end
|