|
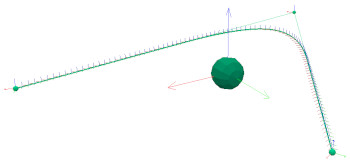
Paths/trajectoriesA path or trajectory is basically just data or a data structure appropriately generated or interpreted. The type of underlying data can be very varied and can represent 1D, 2D or 3D positions, but also orientations, poses, robot configurations/states, etc. For that reason it really depends on the user how that data structure is implemented in code. CoppeliaSim offers several helper API functions related to paths/trajectories, meant to create, interpret and manipulate basic path/trajectory data. There is however one particular type of path data that is often used and that can also be represented in 3D space: poses, i.e. positions and orientations. CoppeliaSim offers for this type of data a path object, that also allows simple visual creation of such data sets, by allowing to manipulate control points, which act as support of the underlying curve:
[Simple path object, composed of 100 pose data points] |