|
Convex hullCoppeliaSim allows calculating and adding the convex hull of specified objects. The convex hull of a collection of meshes is the smallest convex envelope that encompasses all meshes. CoppeliaSim allows extracting the convex hull of measurable objects only. To add a convex hull, select objects that you want to have included in the convex hull and select [Modules > Geometry / Mesh > Convex hull...]. Depending on situations, convex hulls can drastically reduce calculation times in case of distance calculations or proximity sensor simulations for instance. Collision detection can also be performed faster if a rougher approximation (i.e. the convex hull) of a complex shape is used instead. One can also extract the convex hull of a model (e.g. robot), then make it invisible, but perform all calculations (collision detection, distance calculations, etc.) using the invisible convex hull instead of the complex model.
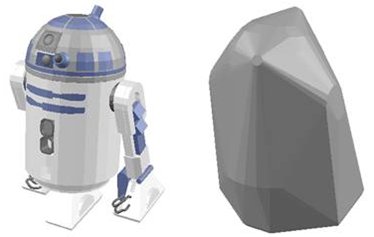
[Objects forming a robot model (left) and corresponding simplified representation as convex hull (right)] See also the simConvex API and calculation of a shape's convex decomposition. |