|
Convex decompositionCoppeliaSim allows calculating and adding the convex decomposition of specified shapes. Convex shapes perform faster and are more stable that random shapes, in regards to dynamic collision response calculation. They are however not as fast nor as stable as primitive shapes. You can generate the convex decomposition equivalent of a shape with [Modules > Geometry / Mesh > Convex decomposition]:
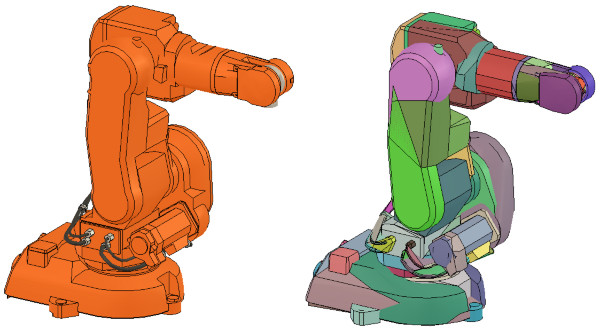
[Non-convex model (left) and corresponding convex-decomposed model (right)] See also the simOpenMesh API and calculation of a shape's convex hull. |