|

Simulation dialog
The simulation dialog can be accessed with [Simulation > Simulation settings] or by clicking following toolbar button:

[Simulation toolbar button]
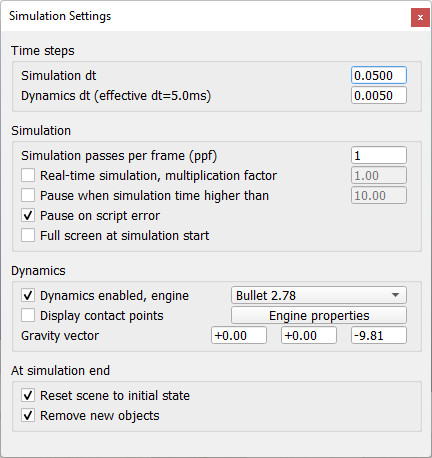
[Simulation settings dialog]
Simulation dt: the simulation time step. Each time the main script is executed, the simulation time is incremented by the simulation dt. It is highly recommended to keep a default simulation dt of 50ms. Keep in mind that the simulation dt cannot be smaller than the dynamics dt (see below).
Dynamics dt: the time step used by the physics engine. Using large time steps results in faster but less accurate simulations. Small time steps on the other hand will lead to more precise simulations, but will take more time. It is highly recommended to keep a default dynamics dt of 5ms. Combined with a default simulation dt of 50ms, this results in 10 dynamics calculation steps per simulation pass.
Simulation passes per frame (ppf): the number of simulation passes for one rendering pass. A value of 10 would mean that the main script is executed 10 times (10 simulation steps) before the screen is refreshed.
Real-time simulation, multiplication factor: if selected, then the simulation time will be clamped to real-time (when possible). A multiplication factor of X would clamp the simulation time to 10* real-time.
Pause when simulation time higher than: allows specifying a simulation time at which the simulation will be paused (e.g. to be able to analyze some results at a specific simulation time).
Pause on script error: if enabled, then a simulation will be paused when a script error occurs in an embedded script.
Full screen at simulation start: if enabled, then simulation starts in full screen mode. Be aware that in full screen mode, dialogs and messages won't appear or won't be visible, and only the left mouse button will be active. For that reason that mode is only recommended once a scene is properly configured and final. Full screen mode can be left with the esc-key.
Dynamics enabled: enables or disables the physics engine. Engine allows to select a physics engine. Each engine has specific strengths and weaknesses. A simulation running fine with one engine doesn't always mean that it will also run fine with the other engines.
Display contact points: shows or hides contact points computed by the physics engine.
Engine properties: each engine has specific parameters that can be set globally. Make sure to read the respective engine documentations to achieve best parameter settings.
Gravity vector: the amplitude and direction of a constant force applied to all non-static shapes (e.g. gravity).
Reset scene to initial state: when selected, then all objects will have most parameters and properties reset to what they were at simulation start.
Remove new objects: when selected, then scene objects added during a simulation will be removed at the end of the simulation.
|