|

Graphs 
Graphs are scene objects that can record and visualize data from a simulation. Data is recorded in data streams, which are sequential lists of values associated with time stamps.
Data streams can directly be visualized as time plots. By combining 2 or 3 data streams, one can obtain x/y curves, or 3D curves in the scene.
Following figure illustrates a time plot, showing 6 data streams visualizing joint velocities:
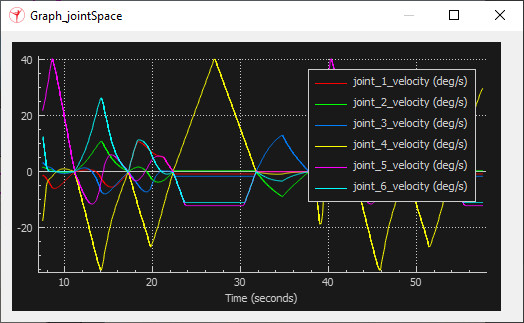
[Examples of a time plot]
A graph is added to the scene with [Add > Graph]. Its basic properties are accessed and adjusted in the graph dialog.
The user is in charge of defining data streams, curves, and feeding them with appropriate data on a regular basis (usually once per simulation step). Following illustrates how to record and visualize 2 data streams (the velocity of two joints over time):
#python
#import math
def sysCall_init():
sim = require('sim')
self.joint1Handle = sim.getObject('/joint1')
self.joint2Handle = sim.getObject('/joint2')
self.graph = sim.getObject('/Graph')
self.joint1Vel = sim.addGraphStream(self.graph, 'joint 1 velocity', 'deg/s', 0, [1, 0, 0])
self.joint2Vel = sim.addGraphStream(self.graph, 'joint 2 velocity', 'deg/s', 0, [0, 1, 0])
def sysCall_sensing():
sim.setGraphStreamValue(self.graph, self.joint1Vel, 180 * sim.getJointVelocity(self.joint1Handle) / math.pi)
sim.setGraphStreamValue(self.graph, self.joint2Vel, 180 * sim.getJointVelocity(self.joint2Handle) / math.pi)
--lua
function sysCall_init()
sim = require('sim')
joint1Handle = sim.getObject('/joint1')
joint2Handle = sim.getObject('/joint2')
graph = sim.getObject('/Graph')
joint1Vel = sim.addGraphStream(graph, 'joint 1 velocity', 'deg/s', 0, {1, 0, 0})
joint2Vel = sim.addGraphStream(graph, 'joint 2 velocity', 'deg/s', 0, {0, 1, 0})
end
function sysCall_sensing()
sim.setGraphStreamValue(graph, joint1Vel, 180 * sim.getJointVelocity(joint1Handle) / math.pi)
sim.setGraphStreamValue(graph, joint2Vel, 180 * sim.getJointVelocity(joint2Handle) / math.pi)
end
Next example shows how to record and visualize an x/y position curve of an object:
#python
def sysCall_init():
sim = require('sim')
self.objectHandle = sim.getObject('/object')
self.graph = sim.getObject('/Graph')
self.objectPosX = sim.addGraphStream(self.graph, 'object pos x', 'm', 1)
self.objectPosY = sim.addGraphStream(self.graph, 'object pos y', 'm', 1)
sim.addGraphCurve(self.graph, 'object pos x/y', 2, [objectPosX, objectPosY], [0, 0], 'm by m')
def sysCall_sensing():
pos = sim.getObjectPosition(self.objectHandle)
sim.setGraphStreamValue(self.graph, self.objectPosX, pos[0])
sim.setGraphStreamValue(self.graph, self.objectPosY, pos[1])
--lua
function sysCall_init()
sim = require('sim')
objectHandle = sim.getObject('/object')
graph = sim.getObject('/Graph')
objectPosX = sim.addGraphStream(graph, 'object pos x', 'm', 1)
objectPosY = sim.addGraphStream(graph, 'object pos y', 'm', 1)
sim.addGraphCurve(graph, 'object pos x/y', 2, {objectPosX, objectPosY}, {0, 0}, 'm by m')
end
function sysCall_sensing()
local pos = sim.getObjectPosition(objectHandle)
sim.setGraphStreamValue(graph, objectPosX, pos[1])
sim.setGraphStreamValue(graph, objectPosY, pos[2])
end
See also the API functions related to graphs.
|